
Check out this article from BIOS’s newsletter, Currents, about the CORAL flume experiments: BIOS Scientists Make Room for Flumes (February 2017)
Science Background
CORAL’s overarching science question is
Q1. What is the relationship between coral reef condition and biogeophysical forcing parameters?
To answer that question, CORAL has two basic science objectives:
O1. Make high-density observations of reef condition for a large, representative fraction of world’s reef area.
O2. Model relationship between reef condition and biogeophysical forcing parameters.
In the science question and both science objectives is the term “reef condition.” CORAL defines reef condition as the combined parameters benthic cover (BC), primary production (P), and calcification (G).
Algorithm Background
CORAL’s science is enabled through airborne measurements using the PRISM imaging spectrometer. PRISM measures spectral radiance at an altitude of 28,000 feet. To determine reef condition, benthic cover, primary production and calcification must be derived from that high-altitude spectral radiance.
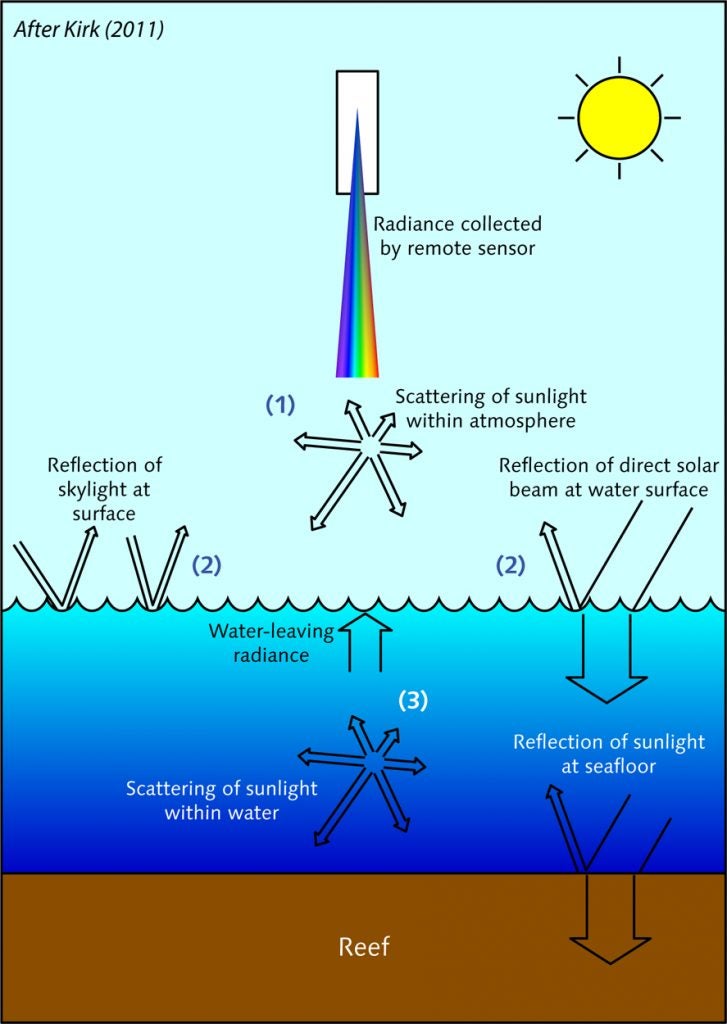
A graphic illustrating the five fluxes of light reaching a remote sensor looking at a coral reef.
The first step is to correct the raw sensor data, termed Level 0 (L0), into calibrated and geo-positioned (each pixel has a latitude/longitude) radiance, which is the Level 1 (L1) product. This is accomplished by applying calibration coefficients that are determined prior to the airborne campaign by pointing PRISM at a special lamp.
The second step is to correct the image data for the effects of the atmosphere and water column. CORAL uses the ATREM algorithm, developed by Bo-Cai Gao (Co-I, Naval Research Laboratory), for atmospheric correction, and a modified version of the HOPE algorithm, developed by Zhongping Lee (Co-I, University of Massachusetts Boston), for water column correction. The result is spectral reflectance of the seafloor, R_b (for bottom reflectance), which constitutes the Level 2 (L2) product.
The third step is to derive BC from R_b. To do this, CORAL applies a multivariate classifier that was developed by Eric Hochberg (PI, BIOS). BC is the Level 3 (L3) product for CORAL, and it is a component of reef condition.
The final step is to derive the Level 4 (L4) products of reef benthic P and G, which are the other components of reef condition. The CORAL L4 algorithm utilizes the concept of light-use efficiency (LUE), which has been applied to land ecosystems for decades. In this concept, P equals the amount of light absorbed by a plant/community multiplied by the efficiency with which the plant/community converts light energy to fixed carbon:
P = APAR * LUE,
where APAR is the total number of photons absorbed the plant/community in a day, and LUE is the photon-to-carbon conversion efficiency.
It turns out that G is strongly correlated to P, which means we can write an equation:
G = c * P,
where c is a constant. Combining the two equations, we get
G = APAR * LUE * c.
Since both LUE and c are constants, we can define LUE_G as
LUE_G = LUE * c,
and simplify the equation for G as
G = APAR * LUE_G
APAR can be determined using the CORAL L2 product and satellite-derived PAR (photosynthetically available radiation). The problem is that there are no published values for LUE or LUE_G. This is simply a topic that reef scientists have not explored.
Flume Experiments
-

- Dr. Eric Hochberg and Dan Schar prepare to place coral specimens in the flume

-

- The flume at the Hawaii Institute of Marine Biology (HIMB) on Coconut Island

The purpose of the flume experiments at BIOS and HIMB is to determine appropriate values for LUE and LUE_G. A community is placed in the flume, then P, G and APAR are each measured over the course of a day. LUE and LUE_G are calculated as
LUE = P / APAR and LUE_G = G / APAR
We make these measurements multiple times for all the different types of reef community: algae, coral, sand, and mixtures of the three. Then, given the CORAL L3 product, the proper LUE and LUE_G can be selected to model P and G.
In the flume, to determine P, we measure the change in oxygen over time. To determine G, we measure the change in pH and total alkalinity over time. To get APAR, we measure PAR incident to the experimental community, which we multiply by the absorptance of the community.
These flume experiments will continue for the duration of the CORAL project.